
Toolbox for the design, modelling, and optimisation of soft robots
Toolbox for the design, modelling, and optimisation of soft robots
Soft-bodied robots provide compliance and adaptability, making them promising solutions in various applications, including food industry, medical and surgical applications. However, these features also bring challenges to the design of soft robots for specific task requirements, which relies on researchers’ background knowledge and experience and may involve a lot of trials and errors. To speed up the design process and reduce costs, an efficient approach is needed to automatically generate design of soft robots for target tasks.
Here are our relevant publications
Yao, L. He and P. Maiolino, "A Simulation-Based Toolbox to Expedite the Digital Design of Bellow Soft Pneumatic Actuators," 2022 IEEE 5th International Conference on Soft Robotics (RoboSoft), Edinburgh, United Kingdom, 2022, pp. 29-34. (Video)
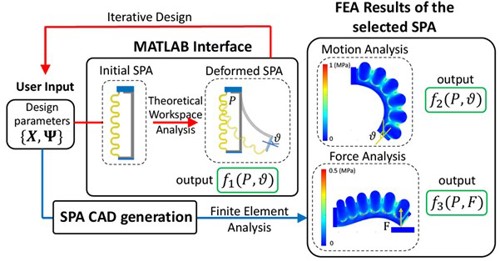
We developed an open-source simulation toolbox (Github link: https://github.com/ORI-SRL/Bellow_SPA_Toolbox.git ) that integrates MATLAB and COMSOL to expedite the design process of bellow soft pneumatic actuators (bellow-SPAs). It adopts beam theory and Finite Element Method (FEM) to analyse and simulate the deformation and force behaviours of bellow-SPAs in relation to their material properties, geometric parameters, and actuation pressure. The beam theory is used to estimate the workspace of bellow-SPAs quickly and roughly, while FEM is used to provided more reliable and comprehensive simulation results of the deformation, blocked force, mechanical stress and strain. The analysis and simulation results are validated by experiments.
Y. Yao, Y. Chen, L. He and P. Maiolino, Design Optimisation for Bellow Soft Pneumatic Actuators in Shape-Matching, 2023 IEEE 6th International Conference on Soft Robotics (RoboSoft), Singapore, 2023.
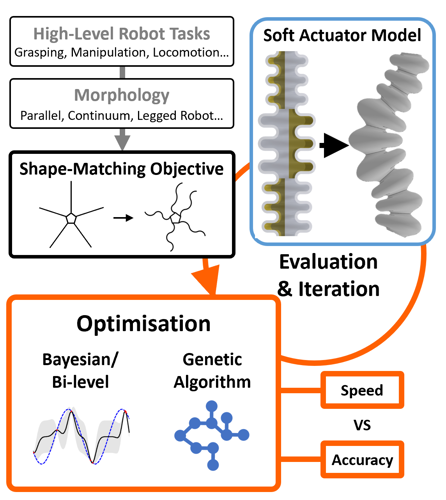
Design optimization of soft actuators is essential for task-oriented applications. Models such as Finite Element Method (FEM), or data-driven modeling approach (e.g., Artificial Neural Network) are widely used to estimate the response of the actuators during actuation. Faced with the trade-off between speed and accuracy, and the challenge of highly nonlinear and non-convex design optimization in soft robots, we compare the convergence performances of Bayesian optimization (BO) algorithm and genetic algorithm (GA) with FEM and Artificial Neural Network (ANN) models. The shape-matching of a multi-legged robot (a starfish) is demonstrated as an example of a task-oriented design scenario that presents design optimization challenges of the design space scalability. The experimental results show that the bi-level BO outperforms BO with FEM for low-dimensional design problems; GA with the ANN model in high-dimensional design problems than bi-level BO with FEM in low-dimensional design problems.