Achieving computation and intelligence with soft, 3D printed devices
Achieving computation and intelligence with soft, 3D printed devices
Pneumatic soft robots are of interest to an increasing number of researchers due to their compatibility in highly unstructured and dynamic environments. However, most existing soft pneumatic robots still require a conventional computational control system (electronic controllers, pumps, rigid solenoid valves,...) to control the pressure within the robot. The use of these externally tethered computational control devices sacrifices the benefits obtained by using soft materials, reducing their compliance, slowing down the reactions, hindering the miniaturizations and limiting their adaptability in practical applications.
The objective of the research is to develop integrable pneumatic circuits consisting of valves that utilize multi-material 3D printing and smart elastomeric materials modulation to enable computational control of soft robots. Achieving this goal enables the community to simplify the process of designing control hardware for soft robots and therefore broaden their potential uses.
Here are the several milestones we've got...
3D printed pneumatically driven bistable valve
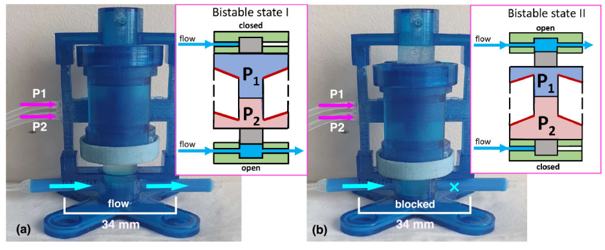
Taking advantage of soft material 3D printing, this work introduces a new design of a bi-stable pneumatic valve, which utilizes two soft, pneumatically-driven, and symmetrically oriented conical shells with structural bistability to stabilise and regulate the airflow. The critical pressure required to operate the valve can be adjusted by changing the design features of the soft bi-stable structure. Multi-material printing simplifies valve fabrication, enhances flexibility in design feature optimisations, and improves the system repeatability. In this work, both a theoretical model and physical experiments are introduced to examine the relationships between the critical operating pressure and the key design features. You can find our paper here.
A modular approach for 3D printed multi-channel valve
Previous research has shown demands for a complex pneumatic system that can regulate the airflow in multiple channels or switch the pressure within a chamber between multiple states. Hardware redundancy is found in such complex pneumatic circuits if only 2/2 way valves are available for the system design. To increase the design freedom, this work introduces a modular approach that integrates multi-channel modular valve units and bi-stable structures for the conversion of pneumatic signals. By utilizing soft-material 3D printing, the 3/2-way valve, 4/2-way valve and 5/2-way valve design are proposed in this paper to control multiple air channels simultaneously. The modular design of these 3D printed multi-port valves allows quick design and fabrication solutions of a complex electronics-free pneumatic system by reassembling different modular units of the valve. You can find our paper here.
A Magnetorheological Elastomer-Based Proportional Valve
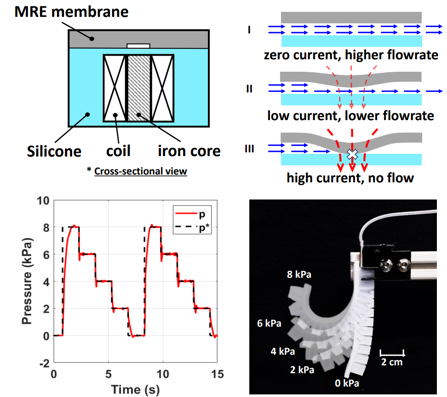
To enable dynamic control of a soft pneumatic actuator (SPA), a fast-response proportional valve is needed. Herein, the potential of Ecoflex-based magnetorheological elastomer (MRE) membrane to create a proportional valve that can be used in the control of a soft robot made from the same silicone material is explored. Experimental characterization shows that the proposed MRE valve (30 mm × 30 mm × 15 mm, 30 grams) can hold pressure up to 41.3 kPa and regulate the airflow in an analog manner. The valve is used to perform closed-loop proportional–integral–differential (PID) control with 50 Hz on a SPA and is able to control the pressure within the actuator chamber with a root-mean-square error of 0.05 kPa. You can find our paper here.